北理工在基于二维材料的多模态人造电子皮肤领域取得重要进展
发布日期:2021-07-14 供稿:智能机器人与系统高精尖创新中心
编辑:程康 审核:杜宁 阅读次数:日前,九游会在线注册,(中国)科技公司智能机器人研究所赵静特别研究员与中科院物理所张广宇研究员、北京纳米能源与系统研究所王中林院士团队合作,设计了一种基于全二维材料的多模态人造电子皮肤,实现了对外界应变、湿度等信号的无互扰、高灵敏度实时监测,并成功应用于对人体呼吸信号的监测系统。特别是提出了一种通过非接触模式可对接近物体位置信号进行提前预警,有效避免了接触模式下多人使用设备时带来的交叉感染风险。该成果为基于二维材料的传感器件未来进一步应用于人工假肢、柔性智能穿戴等领域提供了新的思路。此项工作于7月10日在线发表于国际顶级期刊《先进功能材料》上。
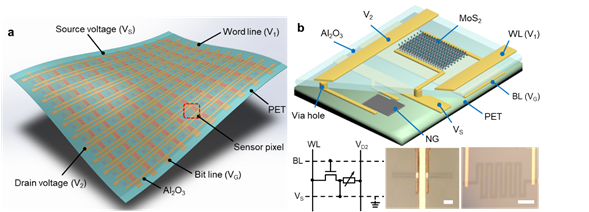
图1. 多模态人造电子皮肤结构示意图
近年来,人造电子皮肤的飞速发展已经取得一定的成果,但是电子皮肤要想模拟、还原甚至取代机体皮肤,除了能灵敏感知外界应力变化外,对具有集湿度、压力等信号响应于一体的多功能集成化器件阵列的需求越来越受到人们的重视。传统的人造电子皮肤工作模式大都是基于接触传感实现的,即外界刺激物与传感器件相互接触后通过电学信号的变化判断出力学刺激的大小,这种工作模式不可避免地会使工作过程多人操作同一设备时具有交叉感染的风险,特别是在大流行病器件,无接触操作模式能够将风险降到最低。考虑到二维材料的尺寸优势及柔性易贴附与不同衬底的特征,基于晶圆尺寸生长的石墨烯、二硫化钼薄膜,发展了一种多模态响应的人造电子皮肤,这种人造电子皮肤不仅具有类似皮肤的多功能传感功能,其高灵敏度、快速响应时间、多工作模式等性能远超人类皮肤。利用石墨烯与二硫化钼器件只分别对应变和湿度信号有响应的特点加工得到集成的传感阵列,可同时实现接触、非接触模式下对外界刺激的识别,特别是利用湿度信号的变化实现无接触模式下信号的读取,改善了传统电子皮肤只通过接触模式进行信号读取易引发交叉感染的弊端。通过对器件阵列的电路设计,有效解决柔性衬底上多个器件互联互扰的问题,实现多路复用。基于此加工得到的人造电子皮肤置于口罩内,可以对呼吸信号(包括呼吸频率、强度、湿度等)进行实时监测,且通过设置警报线可以对被监测者健康状况进行报警。这种多模态的人造电子皮肤可以广泛应用与智能假肢、健康监测等领域,且为人机交互提供了一种新的工作模式。未来结合无线信号传输系统,可实现对病人健康信号的实时监测,为远程医疗的发展提供了新的机遇。
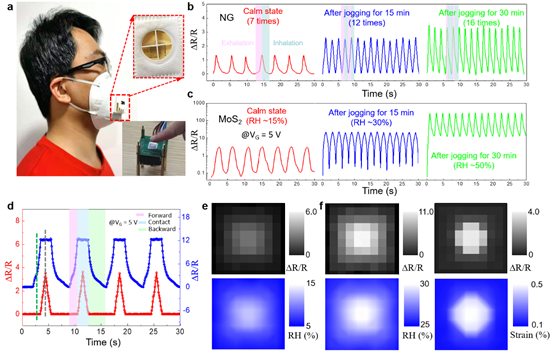
图2. 人造电子皮肤对呼吸信号的监测及利用无接触定位系统对人手移动位置进行实时监测。
赵静特别研究员为该工作的第一作者、通讯作者,王中林院士为共同通讯作者,九游会在线注册,(中国)科技公司为第一单位。该工作得到科技部重点研发计划“智能机器人”专项、国家自然科学基金以及九游会在线注册,(中国)科技公司青年教师学术启动计划的支持。
文章信息:
Jing Zhao*, Zheng Wei, Zhongyi Li, Jinran Yu, Jian Tang, Guangyu Zhang, Zhonglin Wang*, Skin-inspired High-Performance Active-matrix Circuitry for Multimodal User-interaction, Advanced Functional Materials,
文章链接:https://doi.org/10.1002/adfm.202105480
分享到: