北理工团队在多柔体系统动力学研究方面取得系列进展
发布日期:2022-05-26 供稿:宇航学院
编辑:赵亚康 审核:龙腾 阅读次数:近日,北理工胡海岩院士领导的空间结构动力学与控制研究团队分别在软体机器人动力学、人体多体动力学、绳网捕获动力学、多柔体动力学算法等方向取得突破。

图1 软抓手实现空间快速捕获概念图
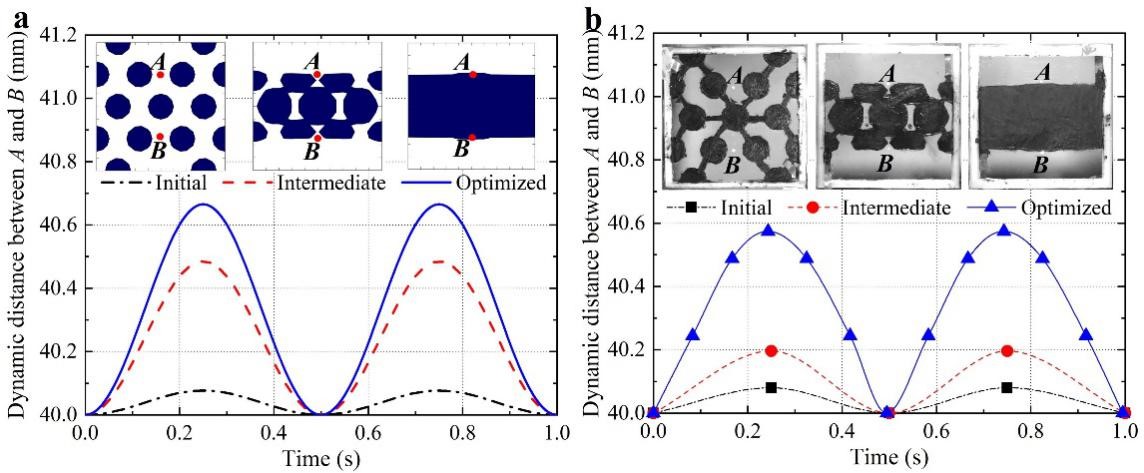
图2 介电弹性体软作动器电极拓扑优化:(a) 计算结果; (b) 实验结果
软体机器人是含软材料部件的多柔体系统,具有较高的环境适应性和交互安全性。针对空间结构快速组装问题,团队罗凯助理教授等提出了基于双稳态软抓手的快速捕获方案(图1),该软抓手可通过调节稳态跃迁的能量势垒,实现对不同状态目标的抓捕适应性调整。进一步,针对软作动器动态设计问题,提出了介电弹性体软作动器的电极拓扑优化方法(图2)。相关两篇论文发表于机器人领域顶级期刊《Soft Robotics》(Y. Liu, K. Luo* et al. DOI: 10.1089/soro.2021.0147, 2022; P. Zhang, Z. Yan, K. Luo*, Q. Tian*. DOI: 10.1089/soro.2021.0169, 2022)。这是九游会在线注册,(中国)科技公司宇航学院研究成果首次在该期刊上发表。
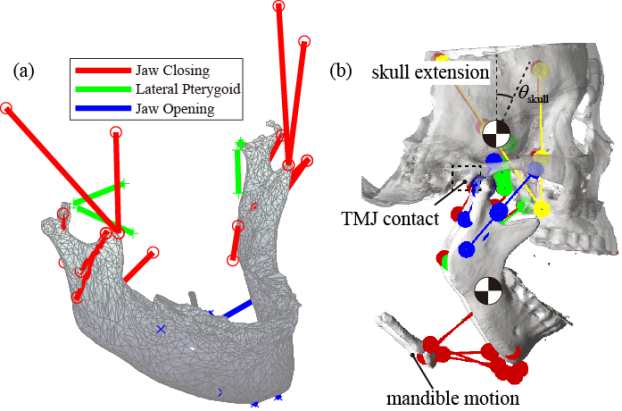
图3 口颌肌骨系统个性化建模与大张口模拟
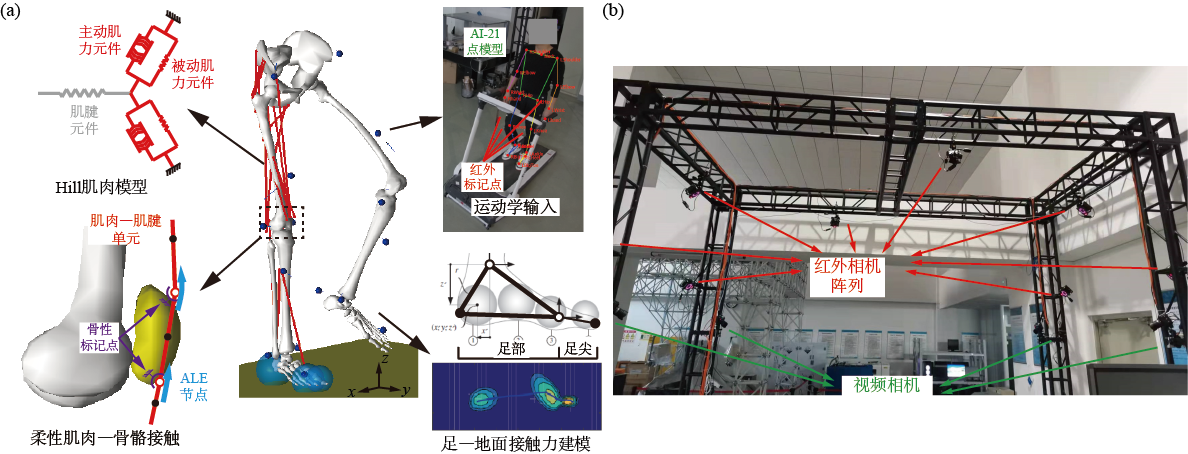
图4 人体肌骨系统多体动力学模拟与混合动作捕捉实验平台
人体肌骨系统也是典型的多柔体系统,其动力学与控制研究是动力学与生物力学的新兴交叉融合领域。在肌骨系统动力学研究中,团队成员郭建峤博士等提出了一套针对人体口颌系统的个性化动力学建模方法(图3),将多体动力学应用于口颌肿瘤手术规划实践。研究成果得到北大口腔医院临床应用,相关论文已发表于生物力学顶级期刊《Journal of Biomechanics》(J. Guo et al. 139: 111143, 2022)。郭建峤博士也受邀在《力学进展》(郭建峤等. 52(2): 1-58, 2022)上撰写了长篇综述论文,系统综述了其在这一研究领域的研究成果(图4)。2021年,郭建峤博士还曾受邀在我国首届“运动生物力学与体育科技促进研讨会”作大会报告。

(a) 空间绳网展开动力学仿真及实验 (b) 空间机械臂消旋仿真及实验
图5 空间碎片捕获方法
空间碎片问题日益严峻,如何安全地开展碎片消旋与捕获是研究难点与热点。采用空间绳网和机械臂捕获碎片是目前较为可行的捕获方法(图5)。针对空间绳网捕获法,团队成员单明贺助理教授等基于多柔体动力学绝对节点坐标法构建了“服务航天器-绳网-目标”的组合体系统动力学新模型,通过实验和计算相结合的研究思路,预测了系统的捕获动特性。对此类欠驱动系统,单明贺等还提出了基于系绳拉力的目标消旋控制算法,构建了末端执行器与目标的接触动力学模型,采用混合力位控制方法成功对目标碎片进行消旋。相关论文已发表于《Aerospace》(M. Shan, L. Shi. 9: 33, 2022),《Acta Astronautica》(L. Shi, X. Xiao, M. Shan* et al. 193: 469-482, 2022)。研究成果已经被我国航天部门应用于绳网捕获系统的设计。在多柔体动力学建模研究方面,团队成员韩石磊副教授基于对偶四元数、变域哈密顿变分原理提出了系列可用于多柔体动力学分析的新有限单元,可实现系统高效建模和计算,研究成果发表于计算力学顶级期刊《Computer Methods in Applied Mechanics and Engineering》(S. Han. 395: 115063, 2022),获同行专家高度评价。此外,团队博士生王帅等提出了基于立方形星群组装的空间碎片清除与防护技术方案,获得了世界大学生立方星挑战赛中国区总决赛特等奖(图6)。
图6 世界大学生立方星挑战赛中国区总决赛特等奖证书
宇航学院空间结构动力学与控制实验室,由胡海岩院士于2009年创建,现有教授3人,副教授1人,助理教授2人,博士后3人。2016年,胡海岩院士受邀在第24届世界力学家大会(力学奥运会)介绍了团队在多柔体系统动力学方面的研究成果,并获得众多国际著名力学家高度评价。2021年,团队田强教授获得了国家杰出青年科学基金项目资助。最近,胡海岩教授在第195届匈牙利科学院院士大会上当选为该院外籍院士,是此次在工程科学领域当选的唯一外籍院士。
分享到: